BowBot - A robotic arm to play the violin
Meet the violin-playing robotic arm! With joints that move like a human’s, sensors that feel pressure and vibration, and software that reads music, this arm can bow, finger, and play complex pieces with real expression. I can finally listen to music without my headphones!
Created by
 ved patel
ved patel
No Grant
15 views
0 followers
Timeline
 CAN ⚡🚀
approved BowBot - A robotic arm to play the violin ago
CAN ⚡🚀
approved BowBot - A robotic arm to play the violin ago
Tickets awarded: 120 tickets
Tier: 2
ved patel
submitted BowBot - A robotic arm to play the violin for review ago
 Tanishq Goyal 🚀
requested changes for BowBot - A robotic arm to play the violin ago
Tanishq Goyal 🚀
requested changes for BowBot - A robotic arm to play the violin ago
as per user request
ved patel
added to the journal ago
I got the 3D prints, however...
This is a quick update,
I got the 3D prints from another library this time, and the tolerances were all off.
Lesson learned: I'm getting all my prints from one library moving forward.
The new prints should be ready in about 3 days.

ved patel
submitted BowBot - A robotic arm to play the violin for review ago
ved patel
added to the journal ago
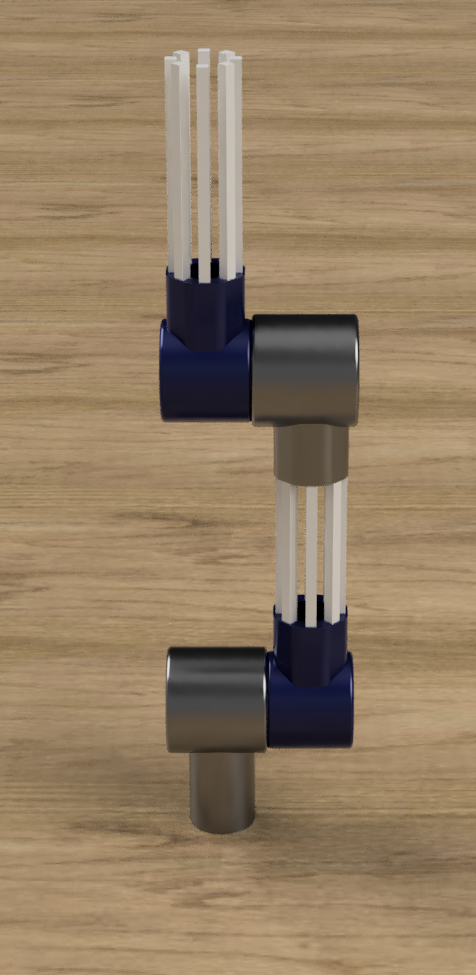
Worked on CAD assembly
I completed the FULL CAD assembly for the 2 arms, the only thing left to CAD now is the base! I sent the updated CAD files to the library and I'm waiting for them to be done to test them out.
The assembly looks SICK!
While building, I found 2 potential problems:
- The center of gravity IS NOT directly on top of the base
- Wires will twist
For now, I'll ignore the 2nd problem and focus on the 1st one. I'll also ask my engineering teacher his thoughts on Monday.
ved patel
added to the journal ago
Received prints + fixed CAD
I received the print from the library!
There were a few problems with it, but I got it running, and I worked on fixing those problems in CAD, and designing the arm.
The issues include:
- Input shaft being very, very hard to put on
- The base not aligning with center "bump" on motor
- Rotors wearing out
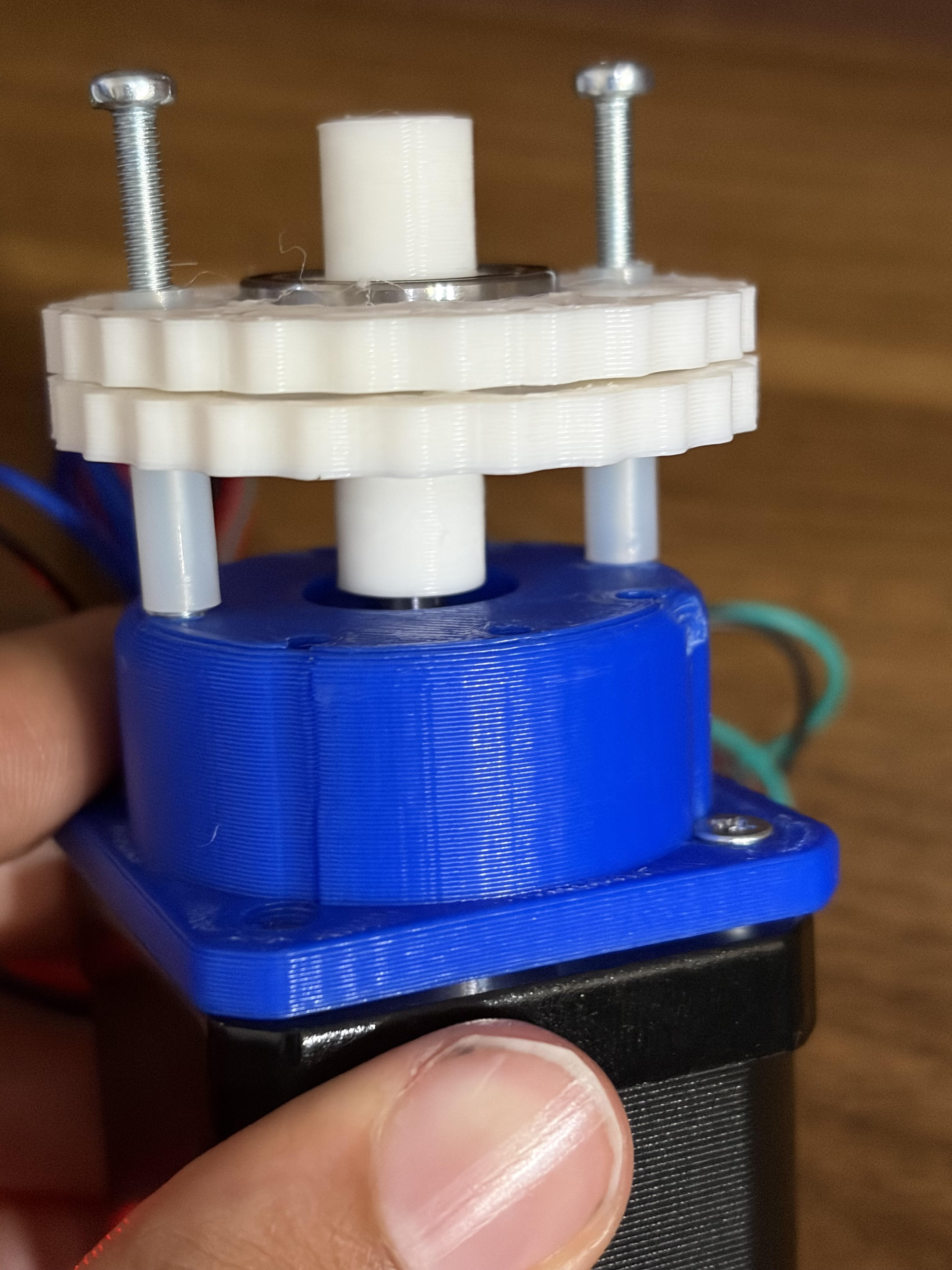
^ updated cycloidal drive with space for balsa wood
Next up, I'll print the updated files and test the torque.
Torque might be a problem, so I want to test that ASAP.
ved patel
added to the journal ago
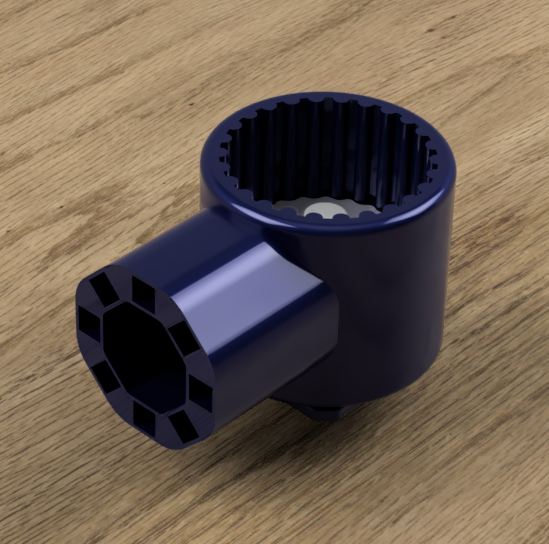
Finished the CAD for the cyclodial drive
I finished the CAD for the drive, and now I'm waiting for the 3D print from the library. So far, I have a test print with the cycloidal drive and it works fine.

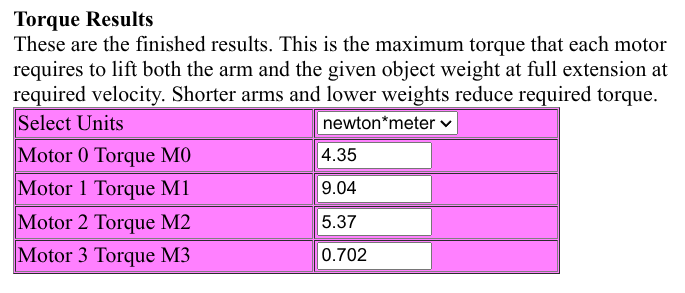
The cycloidal drive will have a 26:1 gear ratio providing ~11.2N torque with a 150mm arm length, assuming 20% efficiency. This is greater than the expected load of ~9.04N.
Torque results:
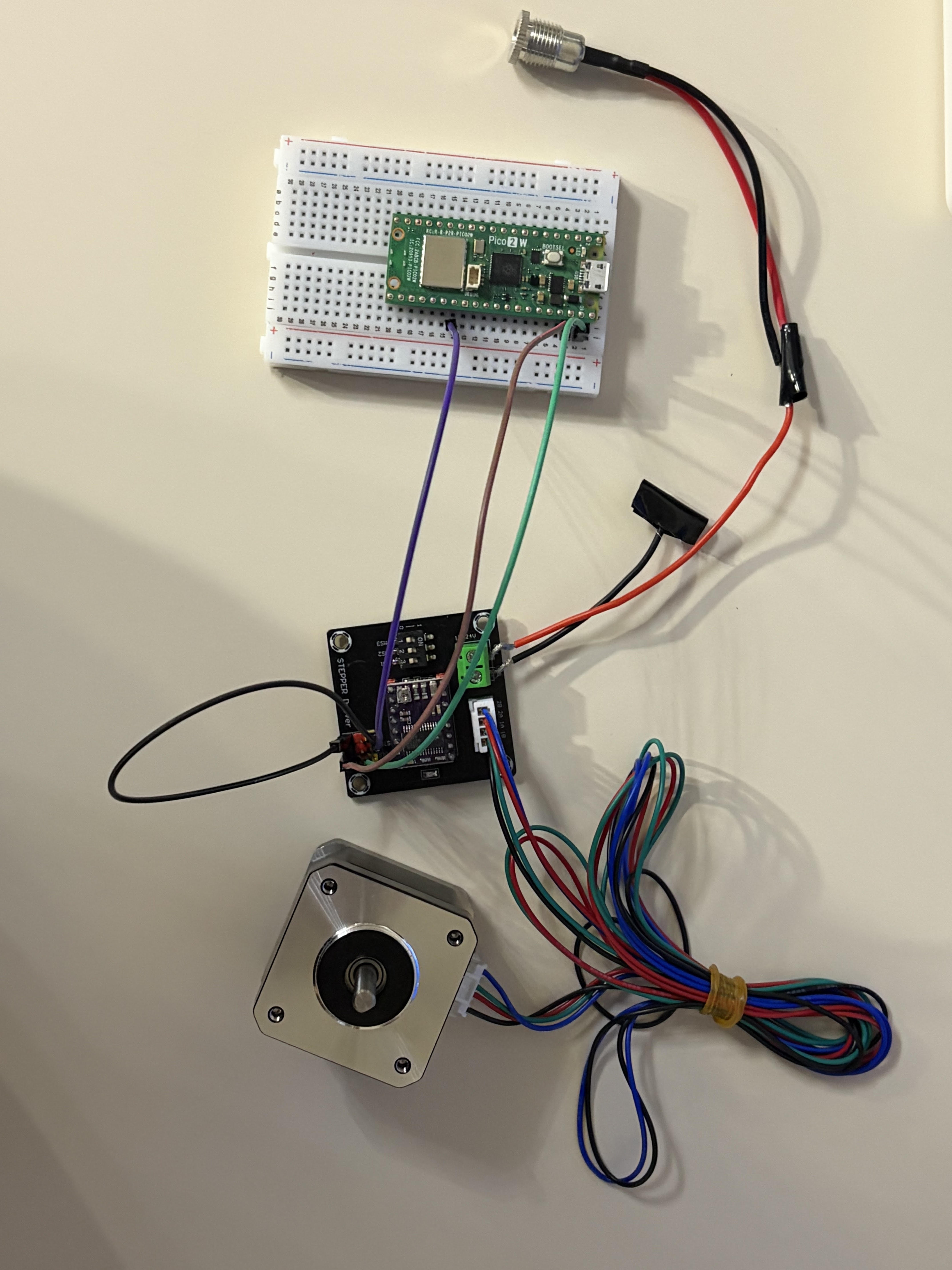
Current circuit (I'll create a custom PCB later):
Power: 12V 3A
Motor: NEMA 17
Motor Driver: DRV8825
Also, I researched about inverse kinematics and found a library that I'll use and created a quick .urdf for it.
ved patel
started BowBot - A robotic arm to play the violin ago